Best Practises for working with Pix4D, Evidence Recorder and IMS Map360 to incorporate Photogrammetry derived data into a Forensic Diagram.
Important Note: Pix4D, IMS Map360 and Evidence Recorder can collect data which can be merged into a single Map360 project. The user must select appropriate settings with regards to Units (Feet, US Feet, or Meters) and the Mapping Coordinate system. This guide will step you through the process.
• Your UAV may require you to select a coordinate system to be used for Geotagging. This coordinate system can differ from the Export and Project Coordinate Systems.
• The coordinate system and units must be the same during the following three stages of the process:
- Collecting Ground Control Points and any additional points and linework when using Evidence Recorder and a GPS Receiver (IF you are exercising this additional option)
- Setting the Export Coordinate System in Pix4D
- Setting the Project Coordinate System in IMS Map360
• Refer to your local surveying authority or use this map to determine which coordinate systems are valid for your geographical region. Once you have selected a system you will probably continue to use the same one as long as you are working in the same region.
Setting the Output Coordinate System in Pix4D
Importing a New Coordinate System in Pix4D
Setting Ground Control Points in Pix4D
Assigning units and a coordinate system
In the Field
1. Perform fieldwork to collect imagery and, if required, ground control points on visible ground targets. A UAV and Terrestrial Cameras can be used to create imagery. Evidence Recorder and an RTK GPS system can be used to collect Ground control points that match painted targets that were included in the photographs. Evidence Recorder can also be used to measure points and linework for other details that you need to include in your map but are concerned will not be visible from the photographs.
In Pix4D
2. Create a new Pix4D project:

3. Add Images to your project:



Note the Image Coordinate System shown above, this is the system by which geotags are interpreted. These may be WGS84, UTM or ITRF. It is dependent on your drone or camera settings. This coordinate system may differ from your Ground Control File coordinate and unit Settings or your Output coordinate and unit Settings without adversely affecting your results.
5. Next, set your Output Coordinate System from the Project Menu:

6. The output coordinate system, plus the units setting, must match those set (or about to be set) in IMS Map360. Select Feet or Meters FIRST, then you will be presented with a list of available systems in the “Known Coordinate System” field. In this example we are selecting the Missouri West system in feet:

Importing a Coordinate SystemIf you don’t see your required coordinate system:Select “From EPSG” and and find your coordinate system on the Spatial Reference website. Download a prj file and consult your Pix4D documentation 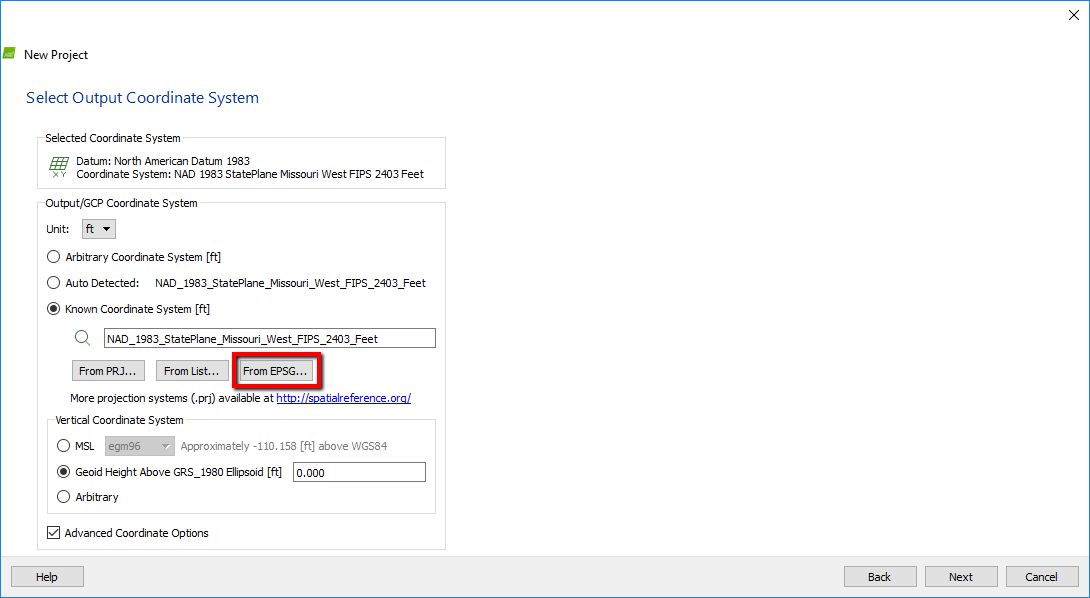 See this article for guidance importing a coordinate system. |

7. Pick Finish

Back to Top
8. If you need to incorporate a GCP file you must select units and a system that matches the one used by Evidence Recorder AND the Output System that you have already defined:

9. Use the dialog below to ensure that you have assigned the same Coordinate system and units for both GCP and Output Coordinate System:


|
See this video for a guide to importing a GCP See this article for a guide on exporting a GCP from Evidence Recorder |
10. See below for some recommended configurations for Processing options:





11. Now we can start Processing.

12. Turn off options 2 and 3 for the first stage and then "Start"

14. This will take a while. When complete, examine the Processing Report. If the results look good, check on Options 2 and 3 and pick “Start” to complete the creation of a pointcloud and orthomosaic.
15. The Result:

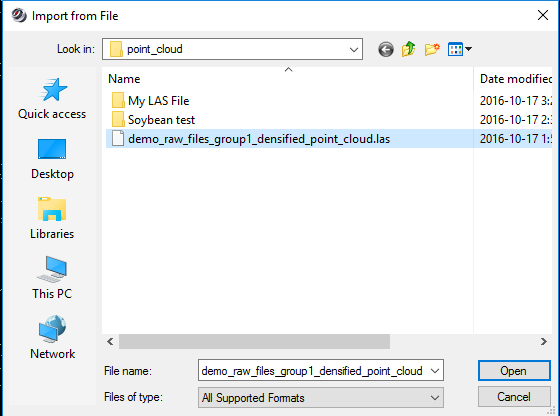
16. Importing the pointcloud, or LAS file into your Map360 project:
In Map360

17. Open or create the drawing which you intend to import the Pointcloud data into.

18. Select the units you would like your final project to be in, and designate a location for your drawing:
NOTE: We recomend using the option to create a scene folder when creating your Map360 drawing, and copying all files that were generated by Pix4D into the same folder. This will make it simple to locate files in the future or move data froim one computer to another.

Open your project settings and set a coordinate system. Use the same system that was designated as the "Output Coordinate System" in Pix4D. Because of variations in naming conventions used in different software you may need to consult MicroSurvey support for guidance on this topic. Pix4D will allow to to review the EPSG reference number of the Output system and MicroSurvey support can reference this number to help you find an equivilent.

20. Start "Import Cyclone" command from the Data Ribbon

21. This will make a connection to the EpcA engine and connect IMS Map360 to Cyclone.
| NOTE: if you see an error message it may indicate you need to install a free viewer version of Cyclone. Visit the downloads page for a link to the latest version. You’ll see a progress bar for several seconds while it establishes this connection. When the Import ModelSpace View dialog appears leave it open.  You must now leave Map360 running in the background. |
In Cyclone

23. Run Leica Geosystems Cyclone. (A free "Viewer" installation is fine, license not required.)
If you see this prompt when you launch Cyclone simply pick "No" to enable free viewer mode |
24. Expand “SERVERS” in the tree
25. Right-click on the “YOURCOMPUTERNAME (unshared)” database and select "Databases":

26. Click the “Add” button

27. …and browse to where you would like to create the new Cyclone database. We would suggest either your Map360 project folder or the location Pix4D has used to create the las file:
(typical Pix4D project location)\raw_files\2_densification\point_cloud)

29. Enter a name for your Cyclone Database (IMP) file and Pick "Open" twice:

30. Select "OK"

31. The new database is added to the list, make sure it’s checked and click Close.

32. In the Cyclone Navigator, right-click on your new database and select “Import”

33. Browse to your .las file and open it.
It may take some time to import, depending on how big the scan is.
34. Expand your database, and you’ll see a new “ModelSpace”.

35. Close Cyclone

In IMS Map 360
36. Return to your drawing in IMS Map360. Use the “Open Cyclone” command on the Import/Export tab (Sketch mode) or on the PointCloud tab (Advanced mode) or type CWIMPORT at the commandline.
37. ALWAYS set the units to Meters when working with Pix4d, and pick on "..." to start the import.

38. Expand the Database tree as shown to find your database the model space to open, and select "Open."

39. ENSURE THAT UNITS ARE SET TO Meters.
Pick on "OK"

40. Select Open
41. Your Pointcloud is imported.
If all procedures have been followed correctly any data collected using GPS and the pointcloud will align with each other.
Importing the Orthomosaic
Map360 can also import the high quality Phot mosaic image that Pix4D generates.
42. Import the Orthomosaic file found in the dsm_ortho folder:
Look in: (Pix4D project location)\raw_files\3_dsm_ortho)
See Here for a guide to importing the Orthomosaic file
Louise Anderson
Comments